Holodecks 2023
Dronevision: An Experimental 3D Testbed for Flying Light Specks
Hamed Alimohammadzadeh,Rohit Bernard,Yang Chen,Trung Phan,Prashant Singh,Shuqin Zhu,Heather Culbertson,Shahram Ghandeharizadeh
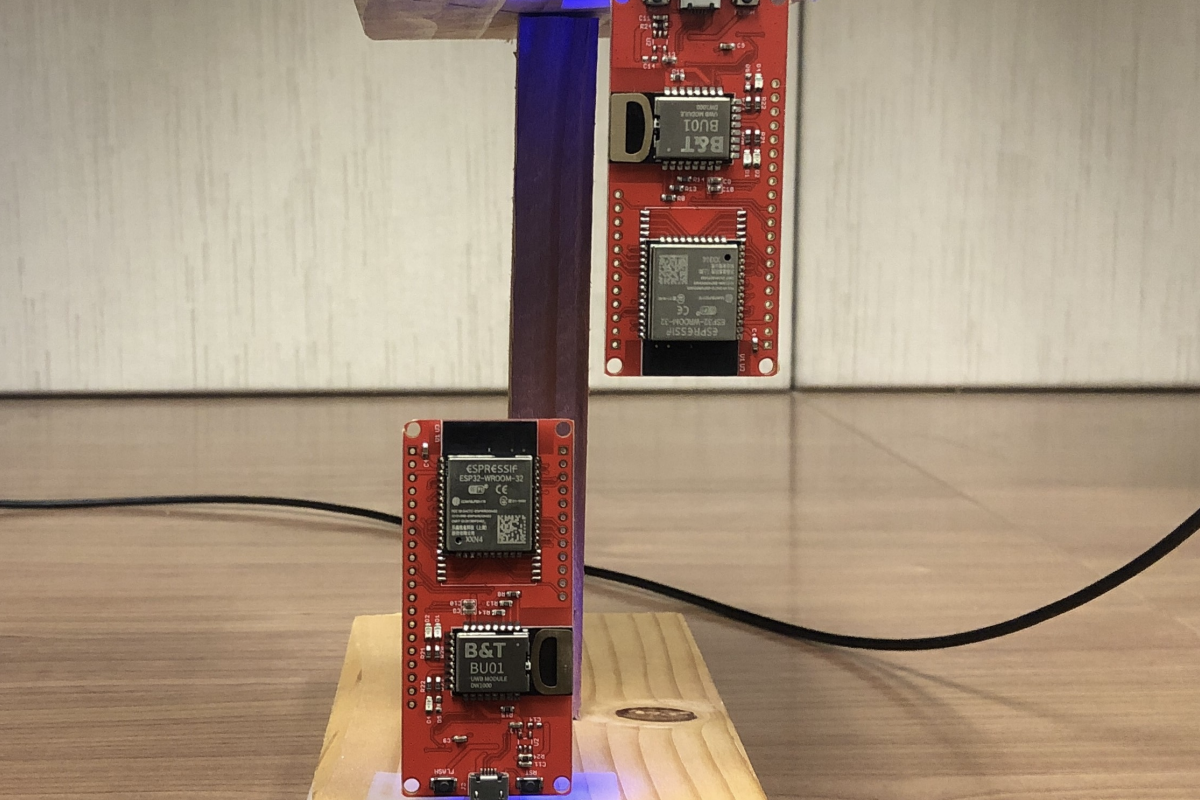
Today's robotic laboratories for drones are housed in a large room. At times, they are the size of a warehouse. These spaces are typically equipped with permanent devices to localize the drones, e.g., Vicon cameras. One may use these laboratories to develop a 3D multimedia system with miniature sized drones configured with light sources. As an alternative, this brave new idea paper envisions shrinking these room-sized laboratories to the size of a cube or cuboid that sits on a desk.